Communication Issues
Analysis of the performance of existing communication technologies, on sea-port scenarios under several weather conditions.

Analysis of the performance of existing communication technologies, on sea-port scenarios under several weather conditions.
Coordination of drones to perform sensing tasks, with heterogeneous requirements, priorities and sampling rates.
Development of tools and software for visualization and analysis of gathered data, employing machine learning tecniques.
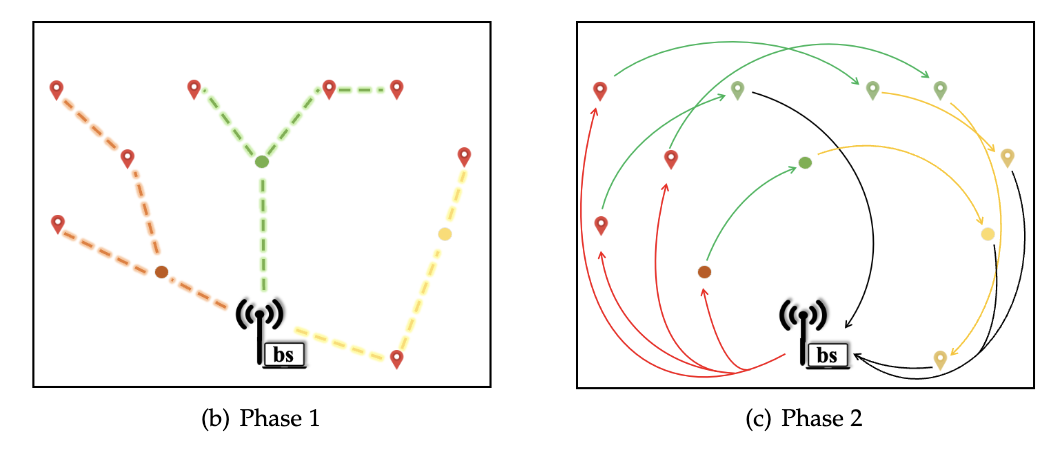
Existing long-range communication technologies are often inadequate to meet the data rate requirements and delay constraints of safety-critical applications. To face this challenge, we formulated the connected deployment problem, where we require the FANET to dynamically create connected coverage formations to ensure multi-hop low-latency communications while performing the monitoring task. We proposed a joint Task Management and Routing Algorithm, called TaMaRA.
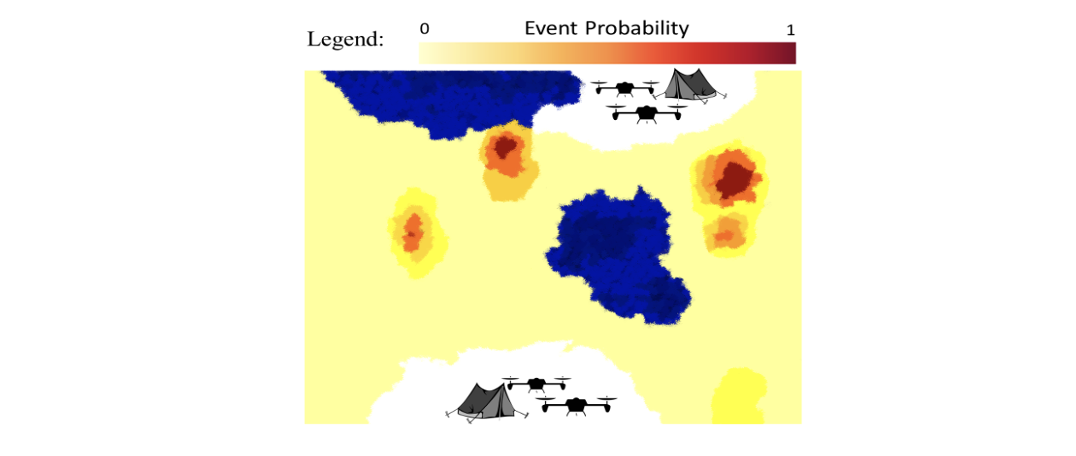
We propose SIDE in the context of critical scenarios where a squad of drones is required to autonomously inspect an area of interest under uncertainty, of time and location of target events. The main goal of SIDE is to ensure maximum coverage of event monitoring with minimum average inspection delay. With no initial knowledge, the drones share their local observations of the environment and apply the Parzen-Rosenblatt approach to manage a dynamic probabilistic map of ongoing events. This map is integrated into a virtual force approach for a joint solution to distributed dynamic trajectory planning and collision avoidance.
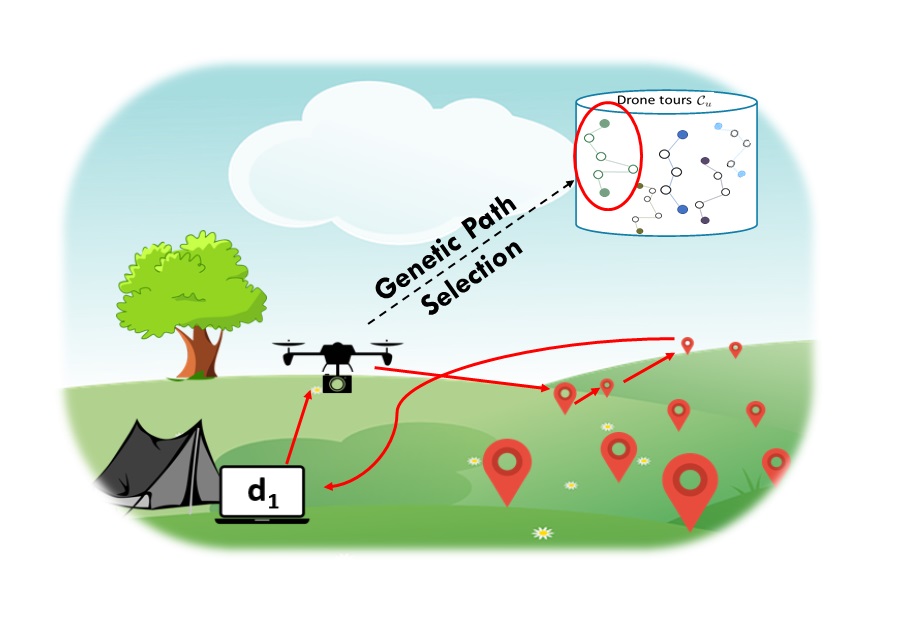
We develop Gen-Path, a genetic algorithm for efficient scheduling of multi-round UAV missions, under several objective functions. The algorithm selects the most efficient paths from a set of feasible trajectories.
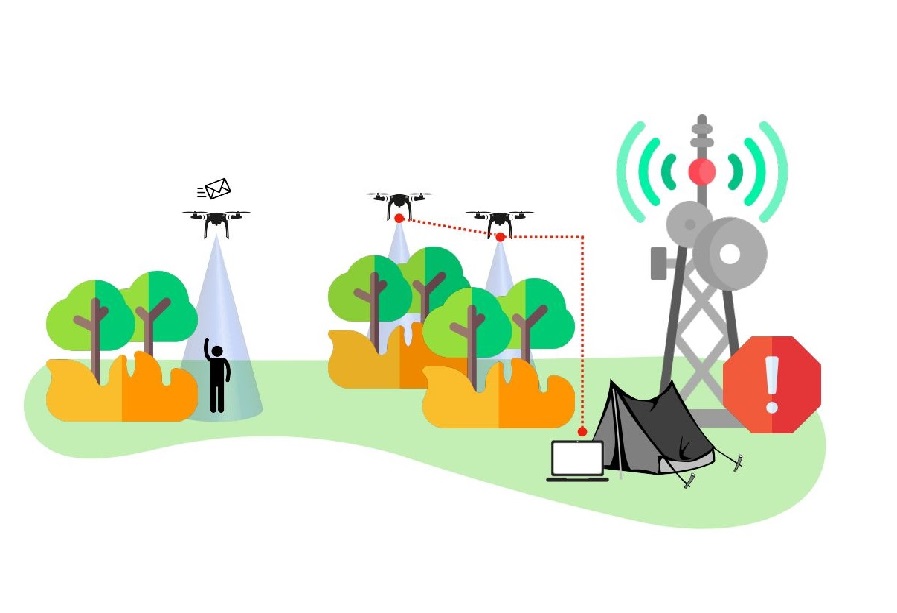
We propose MAD (Movement Assisted Delivery): a packet routing protocol specifically tailored for networks of aerial vehicles. MAD enables adaptive selection of the most suitable relay nodes for packet delivery, resorting to movement-assisted delivery upon need, which is supported by a reinforcement learning approach.